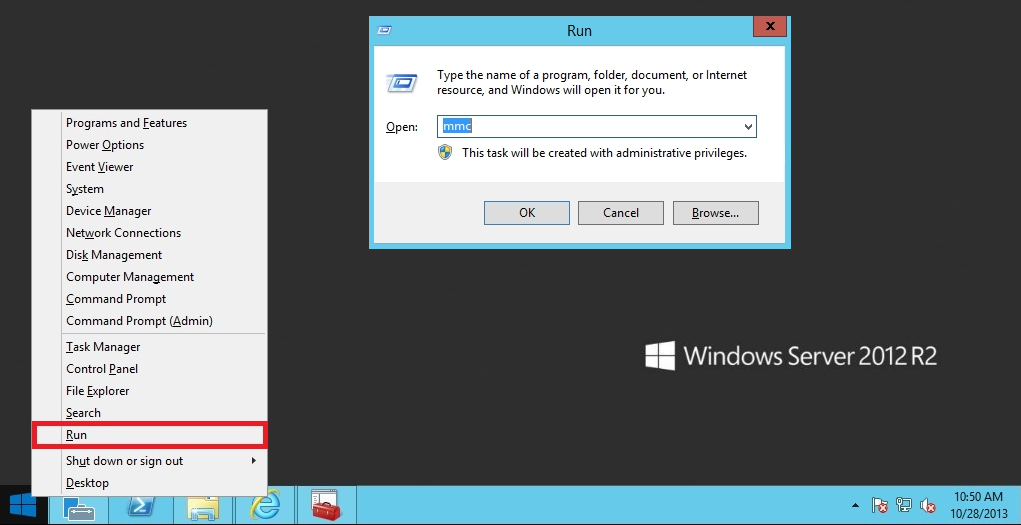
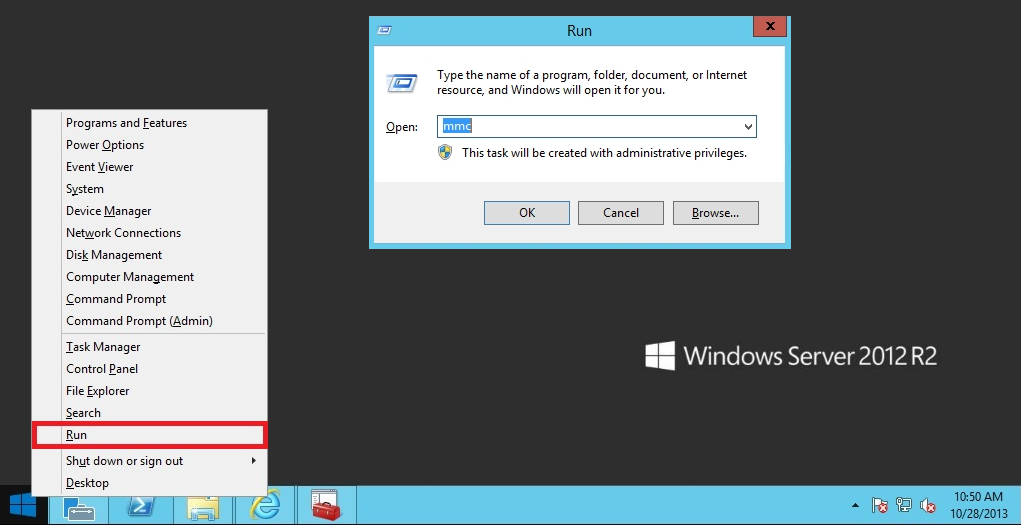
Flight Mode ของ Cleanfligh/Betaflight กัน
โดยทั่วไป เวลาเล่น Racing FPV เราจะใช้งานกันอยู่ 3 Mode หลักๆ ครับ จะสังเกตุได้ว่า Flight Controller ฺRacing version {FC) จะมีแค่ 6 DOF (Six degrees of freedom: forward/back, up/down, left/right, pitch, yaw, roll )
1. Acro Mode (ชื่ออื่นๆ ที่ใช้เรียก: Rate Mode, Manual Mode)
Sensor ที่ใช้ : Gyroscope
โหมดบินนี้ จะเป็นหมดบินโดยตั้งต้น เมื่อเราติดตั้ง FC ไหม่ๆ แล้ว เริ่ม Arm โดยที่ยังไม่มีการตั้งค่า โหมดบิน บน Beta/Cleanflight configurator. โหมดนี้ จะทำให้เราสามารถบินได้อย่างอิสระ ไหลลื่น หลายๆท่านคงเคยดูกล้องบินทึกการบิน FPV ของนักบินระดับโลกหลายๆคน และอาจสงสัยว่า เหตุได เขาถึงสามารถควบคุมตัวลำได้อย่างรวดเร็วและคล่องแคล่ว. ก็เพราะนักบินส่วนใหญ่ จะบินกันด้วย Acro Mode นี่แหละครับ. โดยที่โหมดนี้ จะใช้ค่าที่ได้จาก sensor gyroscope เป็นตัวช่วยเพียงอย่างเดียว
ดังนั้นคำสั่งที่ส่งให้มอเตอร์ทำงาน ก็จะได้รับตรงๆจาก pitch/roll stick บนวิทยุของเรา โดยไม่มีการปรับแต่งแนวระนาบของตัวลำลงไปผสม ซึ่งส่งผลให้เวลาเราโยกสติกไดๆ บนวิทยุ ก็จะไม่ถูกนำไปผสมจากค่าที่ได้จาก Accelerometer sensor เพื่อรักษาระดับ ทำให้ตัวลำตอบสนองต่อสติกของเราได้เร็วขึ้นเป็นกอง
Continue reading →